Jason Parent and Dr. John Volin
Stormwise will take many years to put into practice and will require a great deal of effort spent on educating and obtaining the cooperation of community officials and land owners. To get the most benefit in the short-term, Stormwise will focus on areas where the forest presents the greatest risk to power lines. Since Connecticut has nearly 17,000 miles of power lines, it doesn’t seem practical to evaluate the forest along the power lines from the ground, but fortunately, through remote sensing, we can learn much about the forest and the risk it poses to utility infrastructure from airborne sensors. Airborne light detection and ranging technology (LiDAR) allows us to measure tree heights and stand density as well as the slope and orientation of the terrain. Using Geographic Information Systems (GIS), a computer system that allows us to manage and analyze geographical data, we can use the LiDAR data to identify trees that are close enough and tall enough to be a potential risk to power lines. These data can then be incorporated into the University of Connecticut’s storm damage prediction model thereby making it more robust in its predictive ability.
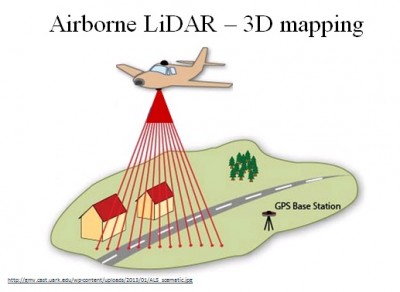
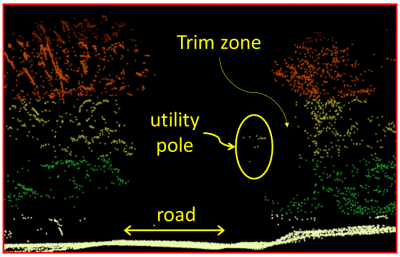
Airborne LiDAR uses a laser scanner, along with a global positioning system (GPS), to provide extremely accurate 3D measurements of the landscape. The laser scanner measures the locations of features on the earth’s surface relative to the aircraft while, at the same time, the GPS determines the location of the aircraft (Figure 1). Modern laser scanners can emit more than a 100,000 laser pulses per second and thus quickly generate large amounts of point measurements with elevation and location information. The distance between point measurements can range from several meters to several centimeters depending on the frequency of the scanner and the altitude and speed of the aircraft. The closer the points are together, the smaller the features that can be consistently identified with the data. For instance, when the point spacing is close enough, we have been able to even detect the cross arms of utility poles with our LiDAR data (Figure 2). Over the past decade, LiDAR data have become routinely used to measure forest canopy height and other stand characteristics.
LiDAR coverage of Connecticut has increased rapidly in recent years with data having been acquired for nearly 75% of the state since 2010. These data were intended to model terrain so they were collected in the late fall when the leaves were off of the deciduous forest canopy trees. The lack of leaves allows laser pulses to penetrate the canopy more easily and reach the ground, which is ideal for terrain models. However, data collected during leaf-off conditions may be less ideal for measuring forest canopy height and density. The laser pulse will penetrate further into a leaf-off canopy before it reaches a cluster of biomass that is dense enough to generate a detectable return signal. Thus, we expect LiDAR to underestimate canopy height when the data are collected during leaf-off conditions.
Before using the leaf-off LiDAR data to identify tree hazards, we first needed to know whether the data could measure the height of the forest canopy with an acceptable level of accuracy. In the summer of 2013, we measured the heights of 1,650 trees, in northeastern Connecticut, and surveyed their locations. We also measured canopy density within 120 forested sample plots. We then compared the field measurements to the models that we created from the LiDAR data. As expected, we found that our data did underestimate canopy heights but the estimates were low by only about 1.5 meters on average. The accuracy of the height estimates did not differ much among the 17 deciduous tree species that were included in the field survey. We also found that using the LiDAR data we were able to accurately estimate canopy density despite the leaf-off conditions.
Because our models closely compared to the field data, we were able to use the LiDAR data to create maps of canopy height and density. Mapping and measuring heights for individual trees with LiDAR, however, is an ongoing challenge that we hope to resolve in the future. Nonetheless, currently we can make a good assessment of power line tree hazards by simply creating a grid that reflects the height of the forest canopy at any given location. The heights of the grid’s cells and their distance from the power lines can then be used to determine whether the forest canopy at that location is tall enough and close enough to strike the power line. We refer to the grid cells in which the forest canopy can pose a risk to the power lines as tree hazard cells (Figure 3). To date, we have mapped out the tree hazard cells throughout eastern Connecticut and, over the next several months, we will map them out for the nearly 75% of the state where LiDAR data are available.
Mapping the tree hazard cells is only a first step in assessing the risk that roadside forests pose to utility infrastructure. A tree located near a power line doesn’t necessarily have a high potential for failure. Based on biomechanics research, Stormwise’s investigators suspect that certain characteristics of a forest stand can help predict the likeliness of tree failure during a storm. Stand density is one important factor that may help predict tree failure and fortunately, this is another characteristic that we can estimate with LiDAR. We can also measure attributes like the slope and orientation of the ground and the roughness of the canopy which can affect the exposure of trees to the wind. With soil data, provided by the Natural Resource Conservation Service, we can also identify tree hazard cells that are located on wetland soils where tree roots are typically shallow and weak. In our ongoing research, we are assessing which forest characteristics are useful in predicting the occurrence of power failures at locations reported in Northeast Utilities’ records.
In conclusion, the efforts begun by Stormwise will require many years to reduce the hazards to utility infrastructure across a large scale. LiDAR and other geospatial data will help to focus these efforts on the locations where they can have the greatest positive impact over the short-term.
|
||
|
 |
|
| Figure 2: A profile view of a LiDAR point cloud (right) with the corresponding area outlined in an aerial photograph. The point cloud has an average density of 1.6 pts/m2. | ||

![]()
Figure 3: Tree hazard cells located along backbone powerlines (red) and along lateral lines (orange).